
 平台热线
平台热线



这里200ID系列提供了28个输入和24个输出。首先我们来看一下CRMA15的引脚是如何定义的,从这张表中我们可以看到,50个端子中有12个端子是未定义状态,也就是没有任何作用,而1-16号以及22-25号的端子定义为输入信号,一共有20个输入点,相对应的33-40号端子则定义为输出信号,一共有8个,其中每个端子的***大输出电流为0.2A。17、18以及29、30号端子分别接24V的负极,49和50号接24V的正极。
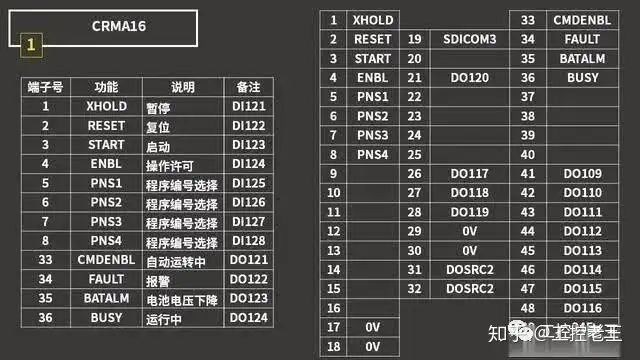
而在CRMA16中,除0V、24F以及DO这些与CRMA15一样功能的端子外,还有一些比较特殊的端子,比如1-8这几个端子,他们均是输入端子。其实在这里我们并不需要记住每个端子是什么功能,因为刚才所展现的CRMA15和CRMA16的表格,是系统说明书上所列出的系统自动分配,但大多数情况下我们都会根据项目的需要进行灵活的设置,所以我们只需要知道哪些端子是输入、哪些端子是输出就可以了,以及他们的物理顺序即可,然后再进行配置,就像从表格备注中所看到的,这里的XHOLD其实就相当于DI121,然后依次增大序号,而CMDENBL就是DO121。而且在配置的时候通常先配置系统信号UOP,若有不用的UOP信号则可以分配给数字信号,从而扩充数字IO的数量
终端企业在机器人的选择,机器人将不太关心的类型,他们需要更多的考虑自动化进程或应用程序,我需要在这个过程中人工操作,以及需要多长时间才能完成该过程。即使协作机器人将在传统的工业环境中消失,因为新的传感器可以被迅速应用到工业机器人。但协作机器人仍然可以找到在中小型制造环境的地方,技术工人在喷漆,焊接,抛光的领域,数控机床持续管理的不足。
详情点击——发那科机器人